ข้อกำหนด
| โหมด | ระบบซีลสามด้าน, เซอร์โวเจ็ดตัว, ระบบป้อนวัสดุสี่จุด, เซอร์โวหลักของเครื่องจักร, การตัดคู่แบบเคลื่อนที่ได้ พร้อมอุปกรณ์อัลตราโซนิก |
| วัตถุดิบ | BOPP, CPP, PET, ไนลอน, ฟิล์มลามิเนตพลาสติก, ฟิล์มเป่าขึ้นรูปหลายชั้น, อะลูมิเนียมบริสุทธิ์, ฟิล์มลามิเนตเคลือบอะลูมิเนียม, ฟิล์มลามิเนตกระดาษ-พลาสติก |
| ความเร็วในการผลิตถุงสูงสุด | 180 ครั้ง/นาที |
| ความเร็วปกติ | 120 ครั้ง/นาที (ซีลสามด้าน 100-200 มม.) |
| 4. ความเร็วสูงสุดของสายป้อนวัสดุ | ≤35 เมตร/นาที |
| ขนาดของกระเป๋า | |
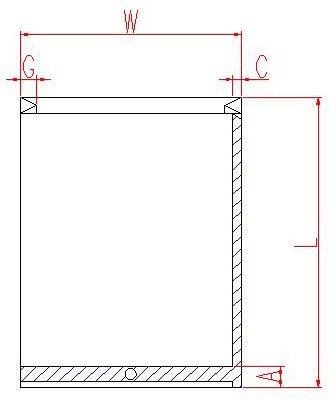
| ความกว้าง | 80-580 มม. |
| ความยาว | 80-500 มม. (ฟังก์ชันการส่งแบบคู่) |
| ความกว้างของการปิดผนึก | 6-60 มม. |
| สไตล์กระเป๋า | ถุงปิดผนึกสามด้าน, ถุงตั้งได้, ถุงซิป และถุงปิดผนึกสี่ด้าน |
| ขนาดของม้วนวัสดุ | Ø 600*1250 มม. |
| ความแม่นยำในการกำหนดตำแหน่ง | ≤±1 มม. |
| จำนวนมีดซีลความร้อน | มีทีมเข้าร่วม 4 ทีมในการซีลด้วยความร้อนแนวตั้ง และ 4 ทีมในการติดตั้งระบบระบายความร้อนแนวตั้ง มีทีมเข้าร่วม 2 ทีมในการซีลซิปด้วยความร้อน และ 2 ทีมในชุดระบายความร้อน มีทีมเข้าร่วม 3 ทีมในการซีลด้วยความร้อนแนวนอน และ 2 ทีมในการติดตั้งระบบระบายความร้อนแนวนอน |
| ปริมาณการควบคุมอุณหภูมิ | 22 เส้นทาง |
| ช่วงการตั้งค่าการควบคุมอุณหภูมิ | อุณหภูมิปกติและสูงถึง 360℃ |
| กำลังของเครื่องจักรทั้งหมด | 45 กิโลวัตต์ |
| ขนาดโดยรวม (ยาว*กว้าง*สูง) | 14100*1750*1900 |
| น้ำหนักสุทธิของเครื่องจักรทั้งเครื่อง | ประมาณ 6500 กิโลกรัม |
| สี | ตัวเครื่องหลักสีดำ ฝาครอบสีขาวขุ่น |
| ระดับเสียง ≤75 เดซิเบล | |
การปิดผนึกสามด้าน
การปิดผนึกสี่ด้าน
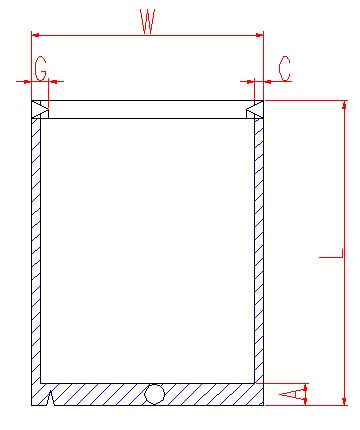
การปิดผนึกสี่ด้าน
กระเป๋าตั้งพื้น
กระเป๋าตั้งพื้นแบบมีซิป
ข้อกำหนดและพารามิเตอร์ที่เกี่ยวข้อง
| อุปกรณ์เฟรมคลาย | |
| โครงสร้าง | โครงสร้างคลายตัวแก้ไขข้อผิดพลาดอัตโนมัติแนวตั้ง |
| การควบคุมแรงตึง | |
| ระบบเบรกแบบแม่เหล็ก | |
| ความคิดริเริ่มในการให้อาหารโครงสร้าง | |
| โหมดควบคุม | เซ็นเซอร์วัดระยะการเคลื่อนที่ของลูกกลิ้งเต้นรำแบบลอยตัว ควบคุมความเร็วในการป้อนออก |
| ลูกกลิ้งป้อนชิ้นงานแบบเรียวที่ติดตั้งแน่น (พร้อมเพลาขยายด้วยลม) | |
| การควบคุมการแก้ไขข้อผิดพลาด (EPC) | |
| โครงสร้าง | การปรับแกนสกรูรอง การยกและลดระดับแนวตั้งของชั้นวาง K |
| ขับ | รีเลย์โซลิดสเตทขับเคลื่อนมอเตอร์ซิงโครนัสความเร็วต่ำ |
| การแพร่เชื้อ | การเชื่อมต่อเพลาเหล็ก |
| ประเภทการควบคุม | การตรวจจับด้วยทรานสดิวเซอร์ไฟฟ้าแบบสะท้อนแสง ควบคุมได้อย่างอิสระ |
| ความแม่นยำในการติดตาม | 0.5 มม. |
| ช่วงการปรับ | 150 มม. |
| ชิ้นส่วนด้านตรงข้ามขึ้นและลง | |
| โครงสร้าง | โครงสร้างการกดสปริงปลายเดี่ยวของลูกกลิ้ง |
| การปรับแต่ง | การปรับด้วยตนเอง |
| อุปกรณ์ปิดผนึกแนวตั้ง | |
| โครงสร้าง | การแสดงผลแนวตั้ง การกดเหล็ก ชุดระบายความร้อน โครงสร้างการกดสปริง |
| ขับ | เครื่องจักรหลักขับเคลื่อนก้านเชื่อมต่อของกลไกเยื้องศูนย์เพื่อให้เกิดการเคลื่อนที่ในแนวดิ่ง |
| ปริมาณ | 4 ทีมด้านการปิดผนึกด้วยความร้อน 4 ทีมด้านการระบายความร้อน |
| ความยาว | 700 มม. |
| อุปกรณ์ซิปแนวตั้ง B | |
| โครงสร้าง | โครงสร้างแสดงผลแนวตั้งสำหรับการกดเตารีด, ชุดระบายความร้อน, โครงสร้างสปริงกด, มีดปิดผนึกด้านล่าง; ที่ยึดเตารีดแบบใช้ลมจะเคลื่อนลงเมื่อเครื่องหยุดทำงาน รีเซ็ตอัตโนมัติเมื่อเครื่องเริ่มทำงานอีกครั้ง |
| ขับ | เครื่องจักรหลักขับเคลื่อนก้านเชื่อมต่อของกลไกเยื้องศูนย์เพื่อให้เกิดการเคลื่อนที่ในแนวดิ่ง |
| ปริมาณ | 2 ทีมสำหรับงานซีลกันความร้อน 2 ทีมสำหรับงานระบายความร้อน |
| อุปกรณ์ปิดผนึกแนวนอน | |
| โครงสร้าง | โครงสร้างสปริงประกอบเครื่องอัดเหล็กแนวนอน ชุดระบายความร้อน |
| ขับ | เครื่องจักรหลักขับเคลื่อนก้านเชื่อมต่อของกลไกเยื้องศูนย์เพื่อให้เกิดการเคลื่อนที่ในแนวดิ่ง |
| ปริมาณ | สามทีมรับผิดชอบด้านการปิดผนึกความร้อน สองทีมรับผิดชอบด้านการระบายความร้อน |
| ความยาว | 640 มม. |
| B. อุปกรณ์รีดเรียบแนวนอน (รีดขอบซิปด้วยความร้อน) | |
| โครงสร้าง | โครงสร้างสปริงประกอบเครื่องอัดเหล็กแนวนอน |
| ขับ | เช่นเดียวกับการปิดผนึกแนวนอน |
| ปริมาณ | 2 ชุดสำหรับการรีดร้อน |
| อุปกรณ์ป้อนฟิล์ม | |
| โครงสร้าง | ลูกกลิ้งยางแบบกดเสียดทาน |
| ขับ | นำเข้าเซอร์โวมอเตอร์ระบบผลิตน้ำไหลออกดิจิทัลเต็มรูปแบบ (พานาโซนิค ประเทศญี่ปุ่น) |
| การแพร่เชื้อ | แถบและล้อที่ซิงโครนัส |
| โหมดควบคุม | การควบคุม PLC แบบรวมศูนย์ การกำหนดความยาวแบบซิงโครนัส และการควบคุมแรงดึงตรงกลาง |
| ความตึงเครียดส่วนกลาง | |
| โครงสร้าง | โครงสร้างลูกกลิ้งแรงดึงลอยตัว |
| โหมดควบคุม | การควบคุม PLC แบบรวมศูนย์ |
| กลไกการควบคุม | แนวโน้มเสริมของการเคลื่อนที่ของลูกกลิ้งปรับความตึงแบบลอยตัวจะควบคุมความยาวขั้นตอนของเซอร์โวกลางเพื่อให้สามารถหยุดและเริ่มต้นพร้อมกันได้ |
| โหมดทดสอบ | แม่เหล็กไฟฟ้าเข้าใกล้สวิตช์ (NPN) |
| ช่วงการปรับความตึง | 0.1-0.2 มม. (การตั้งค่าคอมพิวเตอร์ การชดเชยอัตโนมัติ) |
| อุปกรณ์ส่งสัญญาณหลัก | |
| โครงสร้าง | โครงสร้างก้านเชื่อมต่อแบบดันและดึงของข้อเหวี่ยง |
| ขับ | มอเตอร์เซอร์โว Panasonic ขนาด 3 กิโลวัตต์ |
| การแพร่เชื้อ | เกียร์ทดรอบเครื่องจักรไฟฟ้าส่งกำลังหลัก 1:10 |
| โหมดควบคุม | การควบคุม PLC แบบรวมศูนย์ |
| โหมดการทำงาน | มอเตอร์หลักขับเคลื่อนโครงให้เคลื่อนที่ในแนวดิ่ง |
| อุปกรณ์กำหนดตำแหน่งอัตโนมัติ | |
| โหมดทดสอบ | การทดสอบการติดตามของเซ็นเซอร์โฟโตอิเล็กทริกสะท้อนแสง |
| ความแม่นยำในการทดสอบ | 0.01- 0.25 มม. |
| ความแม่นยำในการกำหนดตำแหน่งแบบบูรณาการ | ≤0.5-1 มม. |
| ระยะการค้นหาด้วยระบบโฟโตอิเล็กทริก | ±3 มม. |
| ช่วงการปรับสมดุลแก้ไข | ±3 มม. |
| การจัดตำแหน่งและการแก้ไขอย่างชาญฉลาด | ระบบปรับสมดุลกระแสไฟฟ้าเซอร์โวแทร็ก ระบบแก้ไขการเคลื่อนที่อัตโนมัติด้วยแสง |
| การตั้งค่าการควบคุมอุณหภูมิ | |
| โหมดทดสอบ | การทดสอบเทอร์โมคัปเปิล |
| โหมดควบคุม | การควบคุม PLC แบบรวมศูนย์, การปรับ PID, รีเลย์โซลิดสเตท |
| ช่วงการตั้งค่าอุณหภูมิ | อุณหภูมิปกติ -360℃ |
| จุดทดสอบอุณหภูมิ | ส่วนกลางใช้ระบบทำความร้อนด้วยไฟฟ้า |
| มีดตัดคู่ (มีดตัดคู่แบบเคลื่อนย้ายได้) | |
| โครงสร้าง | ใบมีดตัดด้านบน + อุปกรณ์ปรับแต่ง + ใบมีดตัดด้านล่างแบบตายตัว |
| โหมด | มีดตัดสปริง |
| การแพร่เชื้อ | มอเตอร์หลักขับเคลื่อน กลไกเยื้องศูนย์สำหรับการเคลื่อนที่ขึ้นลง |
| การปรับแต่ง | การเคลื่อนที่ในแนวนอน (ปลายทั้งสองข้าง) |
| อุปกรณ์กระเป๋าตั้งพื้น |
| ระบบคลายสายอัตโนมัติแบบซิงโครนัส ปรับความตึงในการคลายสายได้อย่างอิสระ พับได้ที่ขอบขาตั้งกล้อง |
| อุปกรณ์บรรจุถุงแบบรูทรงกลมอัตโนมัติและการจัดวางตำแหน่งที่แม่นยำ |
| อุปกรณ์คลายซิปอัตโนมัติ |
| มอเตอร์ป้อนแบบเกียร์เดี่ยวอิสระคลายเกลียว ลดความเร็ว |
| ระบบปรับความเร็วอัตโนมัติด้วยแสง เพื่อให้มั่นใจว่าความเร็วจะสอดคล้องกับมอเตอร์หลัก |
| เครื่องเจาะรู (ใช้ชิ้นส่วนนำเข้า) | |
| โครงสร้าง | โครงสร้างแรงกระแทกหลักของเครื่องยนต์นิวแมติกแบบโค้งที่รองรับ |
| โหมดควบคุม | การควบคุม PLC แบบรวมศูนย์ |
| ขับ | รีเลย์โซลิดสเตทขับค่าโซลินอยด์ |
| จำนวนแท่นเจาะ | สองทีมพื้นฐาน (รูปสี่เหลี่ยมขนมเปียกปูน) |
| กระบอกสูบอากาศ | แอร์แทค ไต้หวัน |
| อุปกรณ์มีดเชื่อม | |
| แนวนอน: | 20 มม.*2 ฐาน; 30 มม.*2 ฐาน; 40 มม.*2 ฐาน; 50 มม.*2 ฐาน |
| ย้อนกลับขอบ | |
| แหล่งจ่ายไฟ | สามเฟส 380V, ±10%, 50HZ ห้าสาย |
| ปริมาณ | 45 กิโลวัตต์ |
| การจ่ายอากาศ | ความดัน ≥ 0.6 MPa |
| น้ำหล่อเย็น | 3 ลิตร/นาที |